Cientistas desenvolveram uma nova mão robótica capaz de manipular objetos apenas por meio do tato. Muitos robôs usam sensores ópticos para “ver” objetos e, assim, interagir com eles. A nova invenção, desenvolvida por engenheiros da Universidade da Califórnia (UC) em San Diego, nos Estados Unidos, faz uso de sensores baseados em toque para lidar com objetos. Deste modo, o robô da UC San Diego abre novas possibilidades para o uso das máquinas no escuro, já que a mão robótica é capaz de girar objetos mesmo na ausência de luz.
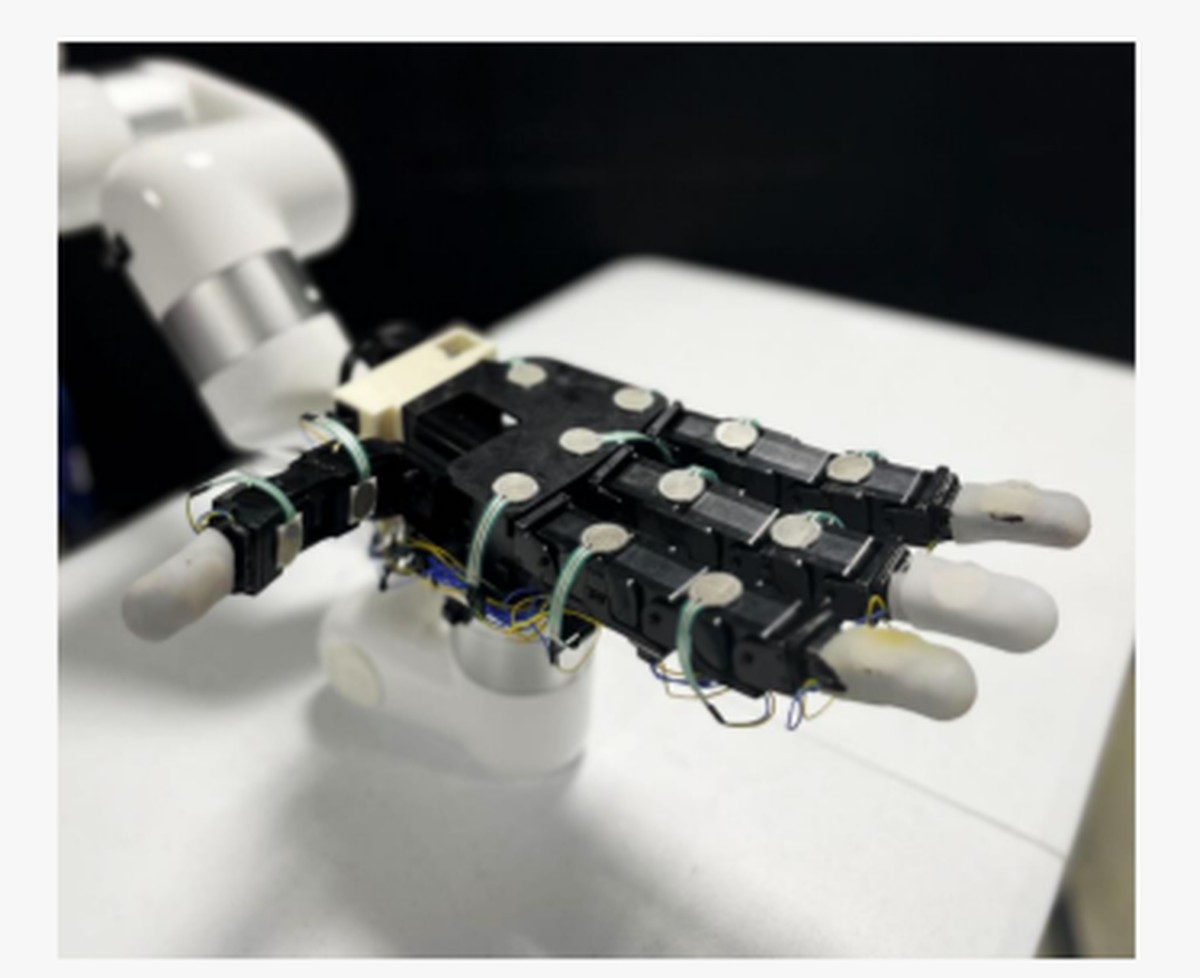
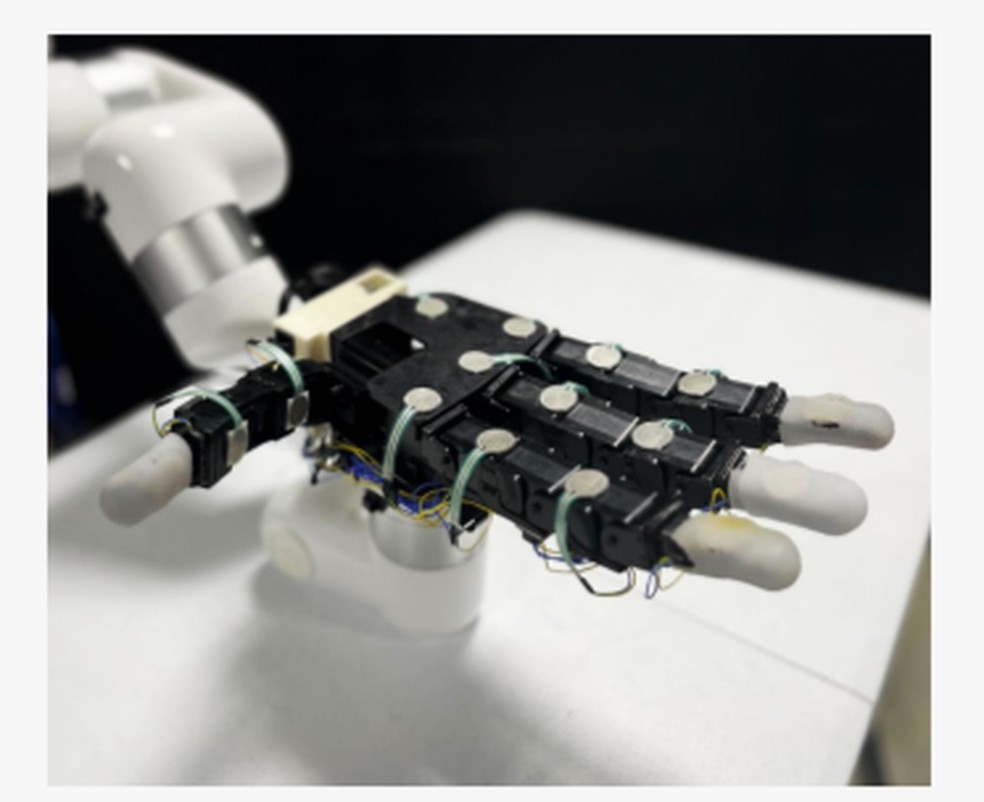
Ao todo, foram anexados 16 sensores táteis ao longo da palma da mão robótica e de seus quatro dedos. Os dispositivos funcionam por meio de sinais binários simples de baixa resolução. Por isso, individualmente, eles não são capazes de captar muitas informações. Contudo, o conjunto deles é capaz de absorver diferentes aspectos do objeto e girá-lo suavemente.
A técnica foi desenvolvida primeiramente no ambiente virtual. Durante o processo, uma versão digital da mão robótica executou diversas simulações de rotações de objetos como bolas, cubóides e cilindros. A equipe coletou um grande volume de dados graças a um modelo de computador que determina a posição do objeto durante todo o movimento. Esse modelo baseia-se na captação em tempo real obtida pelos sensores binários “toque” ou “sem toque”.
Por não depender de física simulada com medições exatas, e sim dos dados simplificados obtidos por meio dos sensores binários, transferir as habilidades virtuais para um robô real não foi uma tarefa complexa, na visão dos pesquisadores. Nos testes, a mão robótica manuseou, sem perder o controle, objetos inéditos, como maçãs, tomates, latas de sopa e patos de borracha. Veja o robô em ação no vídeo publicado no YouTube por Binghao Huang, um dos pesquisadores envolvidos no projeto:
Cada um dos sensores utilizados na mão robótica da UC San Diego custa US$ 12, ou cerca de R$ 56, o que representa um baixo custo para o meio tecnológico. Há outras técnicas empregadas na robótica que utilizam poucos sensores de toque de alta resolução agrupados em pequenas áreas da mão, principalmente na ponta dos dedos. No entanto, de acordo com o professor de engenharia elétrica e de computação da UC San Diego e líder do estudo Xiaolong Wan, optar por vários sensores mais simples em vez de poucos mais poderosos pode aumentar a detecção do sistema e produzir dados mais simples de serem analisados, além de baratear a produção.
Atualmente, a equipe do professor Wang está desenvolvendo tipos de manuseio mais complexos. A ideia é fazer com que a mão robótica consiga executar tarefas como pegar, arremessar e até mesmo fazer malabarismo. O pesquisador acredita que, apesar da manipulação manual ser uma habilidade comum aos humanos, a execução desta tarefa por meio de robôs pode abrir portas sobre que tipos de tarefas eles podem realizar.
Três rotinas de casas conectadas que você deveria testar

Três rotinas de casas conectadas que você deveria testar


